用于混合手术的模块化手术机械人系统
随着技术的发展,医生越来越希望在手术过程中使用手术机器人以大幅提高手术的准确性和精确度,同时将患者的风险和恢复时间降至最低。然而,到目前为止,手术机器人在世界各地的应用有限。本项目将为医生提供模块化的手术机器人系统,并对普通医学研究开放。我们将创建一个完整的手术机器人系统,此系统具有模块化的末端关节和末端执行器以应用于通用外科手术,该系统将提供以下主要功能:
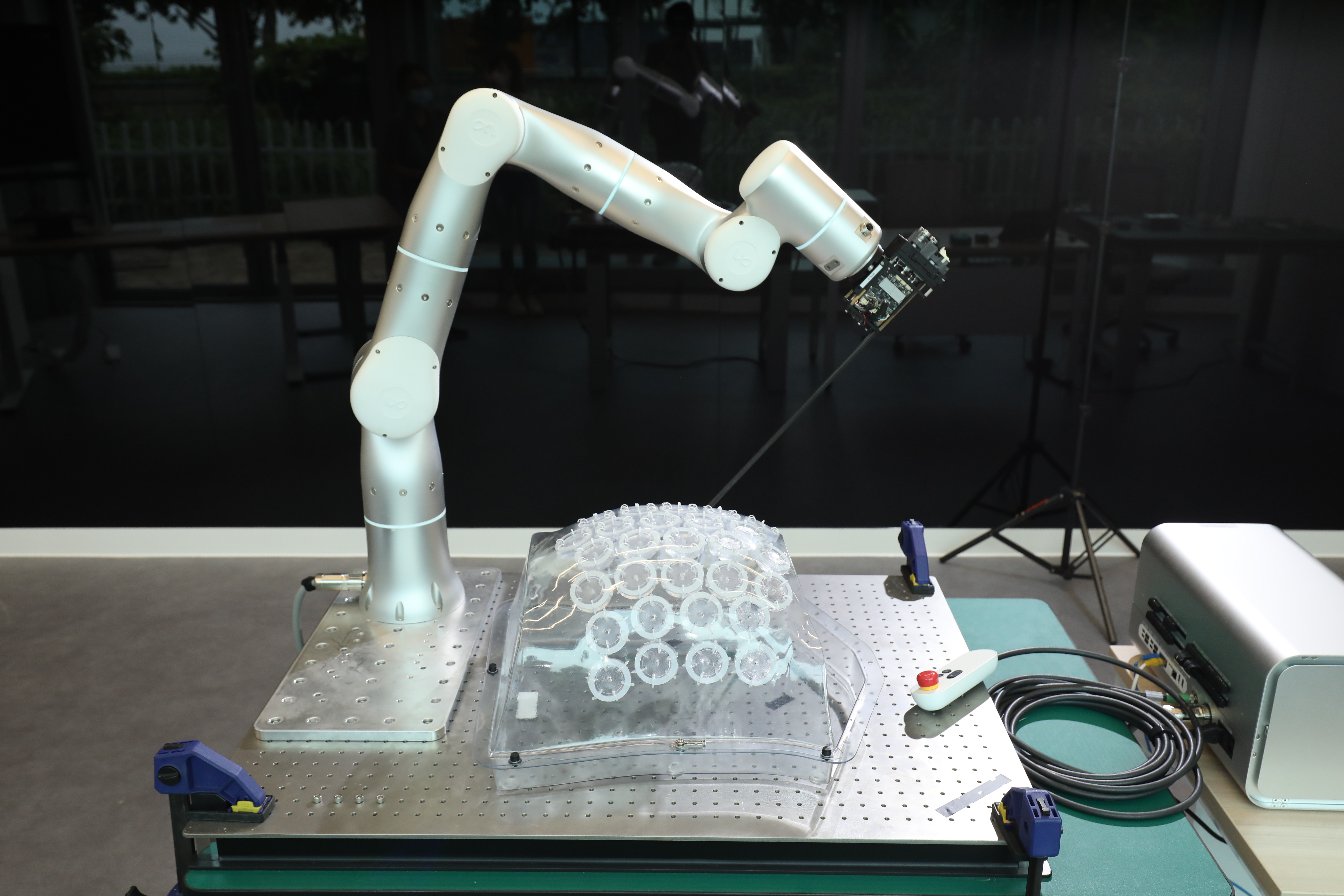
1) 我们将开发7自由度机械臂,此机械臂将采用无刷直流电机驱动,从而降低机械臂的磨损,同时其具有扭矩响应高且平稳的优点,从而降低维护成本。此外我们将对驱动器的尺寸进行优化,以保证小巧的机械臂轮廓,同时保持其良好的机械性能。机械臂的冗余结构将使得其工作空间得到优化,以提高避障能力。
2)我们将研究具有容错性的机电设计,此设计具有并行计算、传感和反向驱动能力。此外,我们还将搭建一个具有良好鲁棒性和实时性的软件结构,为机械臂执行器、传感器和计算机网络提供一个低延迟且可靠的控制和通信框架。
3) 我们将开发智能遥操作控制装置,减轻外科医生手术中的疲劳度,并且提高手术准确性和精确度。
4) 我们将开发各种末端关节和末端执行器以应用于不同的外科手术,并且通过模块化的设计以达到在手术操作过程中进行快捷切换和安装。
下一个
1.1 用于经胃肠道进行复杂手术的机械人内镜平台