机械人平台技术的进步令腔内手术产生变革。借助腔内多尺度机械人平台,外科医生将能够在中空内脏器官执行复杂的腔内手术,包括上消化道和下消化道、口腔和鼻腔、支气管以及泌尿道。
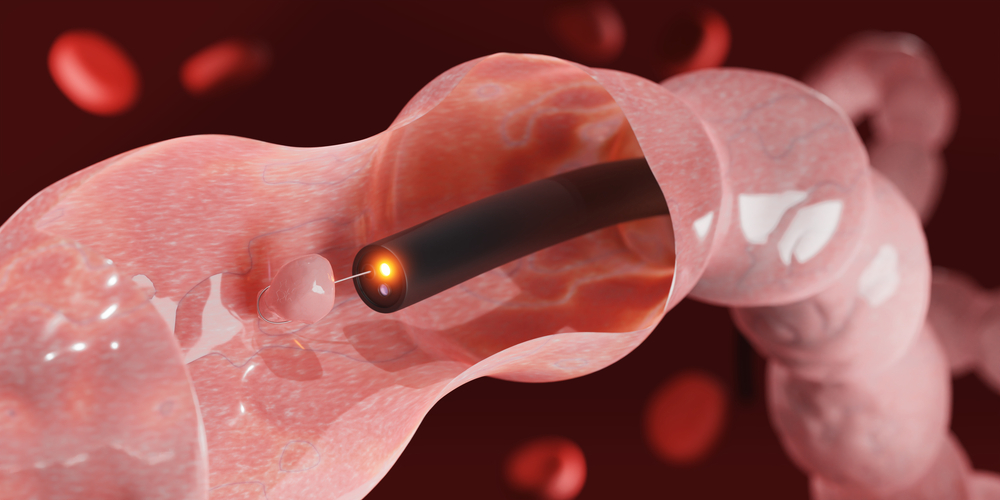
在过去的二十年,创新技术的发展拓宽了治疗性内窥镜的可能性。建基于香港中文大学的研究,医疗机械人创新技术中心的研究团队确立了以内镜治疗取代手术作为消化性溃疡出血的主要治疗方法,并率先采用内镜黏膜下剥离术(Endoscopic Submucosal Dissection)治疗早期胃肠道癌症。虽然内镜黏膜下剥离术可达与传统手术相近的肿瘤清除率,执行上仍然具技术困难。自然孔道内窥镜手术(Natural Orifices Transluminal Endoscopic Surgery)的概念进一步挑战传统柔性内窥镜的性能,并触发了重新设计内窥镜和治疗工具的研究。对此,医疗机械人创新技术中心研究团队首先开发了原型内窥镜缝合装置——Eagle Claw,该装置经临床前证明,可安全有效地用于大面积出血溃疡和胃切开闭合的止血。迄今为止,团队已开发出原型机械臂,能够于临床前活体动物研究完成内镜黏膜下剥离术程序,包括组织牵开及解剖。

凭借医疗机械人创新技术中心团队在机械人辅助内窥镜手术方面的往绩,这项研发计划将进一步开发用于内窥镜手术的概念验证机械人内窥镜,标志癌症手术技术进步的新里程碑。医疗机械人创新技术中心提供了平台,促使未来微创手术机械人的发展,将高风险的癌症手术变得更安全。
团队领导者

趙偉仁教授
香港中文大学医学院
LinkedIn[javascript protected email address]

任揚教授
香港中文大学机械与自动化工程学系
[javascript protected email address]

Lord Ara DARZI教授
伦敦帝国学院医学院
LinkedIn[javascript protected email address]

Ferdinando RODRIGUEZ Y BAENA教授
伦敦帝国学院机械工程学系
LinkedIn[javascript protected email address]


下一个
研究计划2︰磁引导腔内机械人平台