Mobile-Coil System for Magnetic Microrobot Manipulation
Endovascular interventions are essential for the treatment of various vascular diseases. However, they are often limited by the tethered design and size of the medical tools, making access to tiny and tortuous vessels time consuming or even impossible. Recently, small-scale robotics has emerged as a promising research direction, both in its fundamental aspects and applications in biomedicine. As the characteristic dimensions of the robot or machines scaling down to the milli-/microscale or even smaller, they are ideally suited to navigating in regions inside the human body that are inaccessible to regular devices. Such tiny robots have the potential for various clinical applications such as targeted drug delivery and minimally invasive intervention.
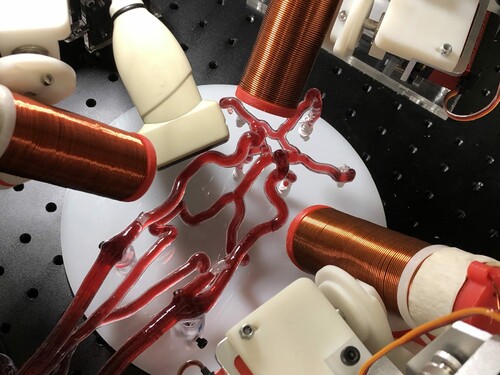
In this project, the team aims to develop a microrobotic platform for the image-guided endovascular intervention for treatments of vascular diseases. The microrobotic platform utilizes the nanorobots swarm and the magnetic actuation system for active drug delivery to a targeted region inside the vessels. The nanorobots swarm is capable of remotely navigating in tiny vessels deep inside the body, for example cerebral artery, delivering high dose of drugs to the region locally. The proposed microrobotic platform for endovascular intervention has been proved to be more efficient with lower required drug dosage. It potentially provides a new enabling technology with enhanced treatment efficiency, benefiting millions of patients with different vascular diseases.
Related Media Highlight:
- Nature Spotlight
https://www.nature.com/articles/d42473-021-00401-2
- CNN
https://edition.cnn.com/2018/09/04/health/nano-swarm-robots-intl/index.html